 Stick¶
Stick¶
The wired transmitter is configured through the following tabs, which cover the following content:
Setting of the transmitter’s parameters.
Definition of exponential response-curves for the desired channels.
Trimming of the channels’ neutral position.
Setting of the data receiving port on the autopilot.
PPM¶
This tab provides the options to configure CEX to read a PPM radio controller to control the platform.
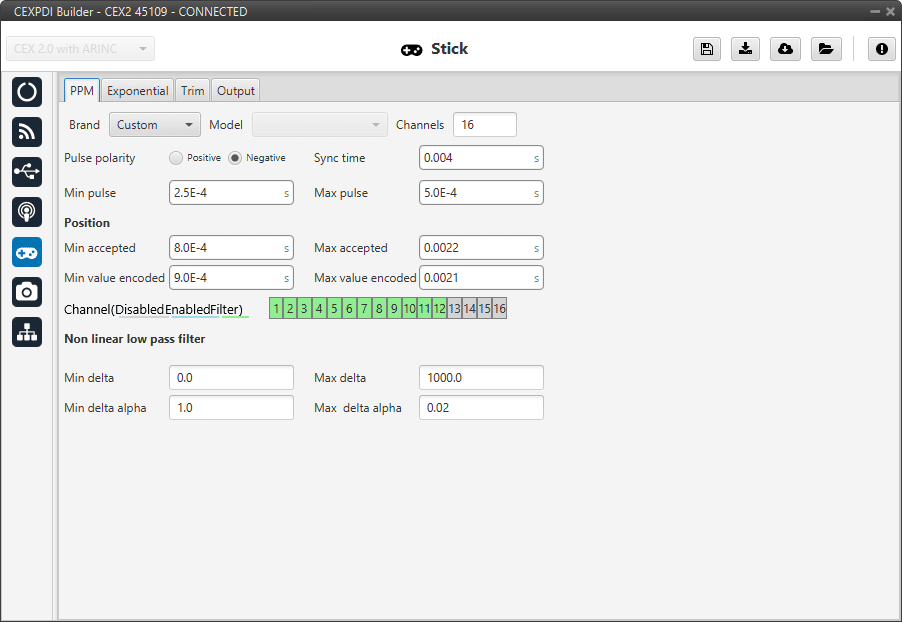
Stick - PPM panel¶
Brand, Model and Channels: CEX PDI Builder has been configured to provide the user with the expected parameters to configure different transmitters models.
Brand
Models
Channels
Futaba
8J/10J/12K/14SG
8 (for 8J and 10J)
12 (for 12K and 14SG)
T18SZ
8
Jeti
DC 16/DC 24
16
FrSky
Taranis X9D
8
Horus X12S
8
TBS
Crossfire
8
Embention
Stick Expander
16
Custom
-
-
Custom: If the user’s transmitter is not among those mentioned above, choose this option and replace the parameter values with the appropriate ones.
Pulse polarity: Indicates the pulse polarity:
Positive: Default signal is low and goes up to high.
Negative: Default signal is high and goes down to low.
Sync time: Minimum time on the PPM output till the next frame. It tells the receiver to reset its channel counter.
Minimum/Maximum pulse: Pulse length, it depends on the system and it is a constant value (usually 0.2-0.5 ms).
Position
Minimum/Maximum accepted: Pulse length accepted for each channel. Standard for R/C servos uses a pulse of 1 ms for the maximum position at one end, 1.5 ms for the midpoint and 2 ms for the maximum position at the opposite end.
Minimum/Maximum encoded: If there is noise and the signal is varying around the minimum/maximum values accepted, CEX will encode those values to the ones set here. For instance, a pulse length between 0.8-0.9 ms will be considered as one of 0.9 ms.
Channels: Sets the number of channels accepted. Besides, it is possible to Disable/Enable/Filter each channel individually.
Non linear low pass filter
Minimum/Maximum delta: Default parameters are recommended.
Minimum/Maximum delta alpha: Default parameters are recommended.
The figure below shows the shape of the PPM signal.
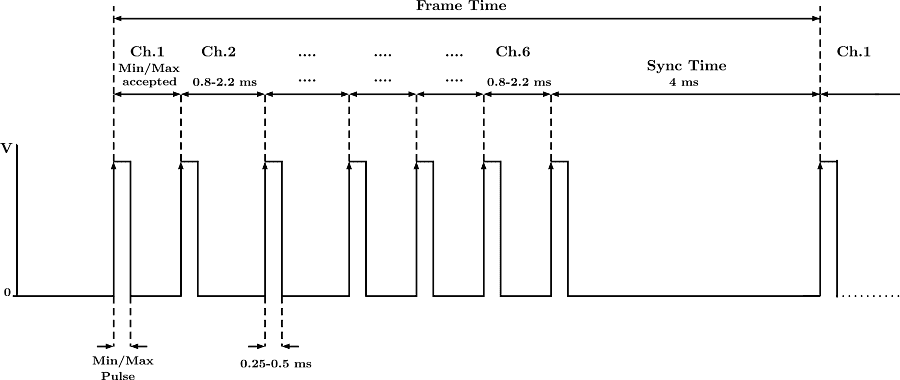
PPM signal¶
Exponential¶
The exponential tab allows the user to define an exponential stick response for every channel.
The allowed inputs range from 0 to 1 and there is a graph showing the generated response curve, as can be seen in the figure below.
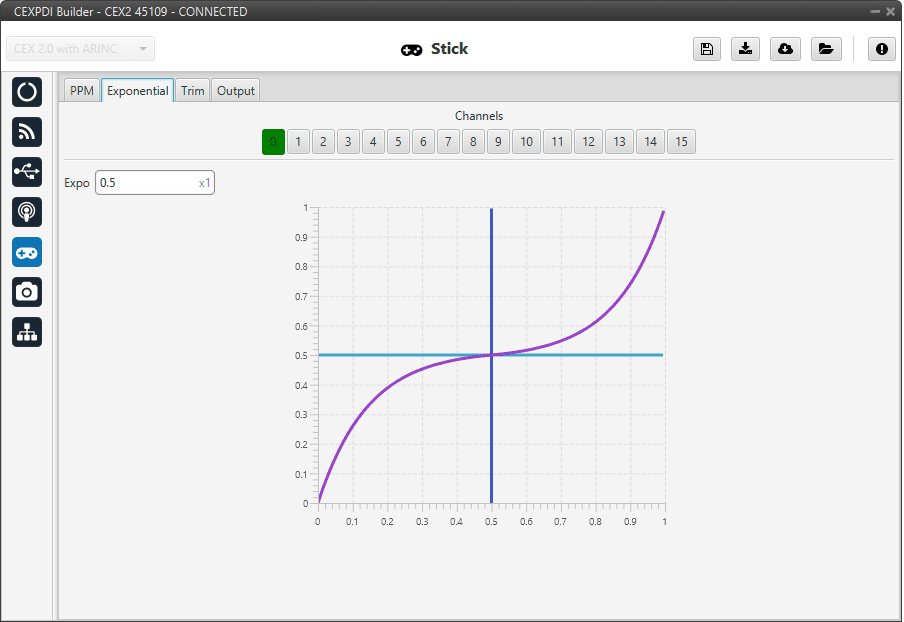
Stick - Exponential panel¶
The X axis of the graph corresponds to the stick input and the Y axis is the result of applying the exponential function to that stick input.
Trim¶
By enabling the Avanced option, the user can set the expected trim values manually. The user should have a deep knowledge on its transmitter if this option is selected.
Finally, on the right hand side, the Reset button puts every parameter back to 0.
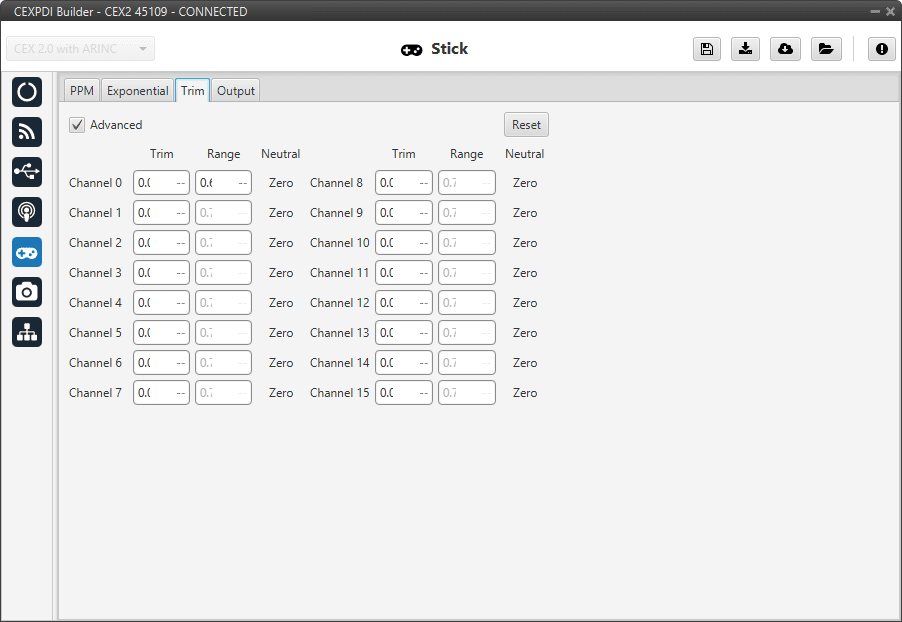
Stick - Trim panel¶
Output¶
In this menu the user sets the receiving port and process the incoming commands. Once the stick has been configured, the commands have to be sent to the air unit.
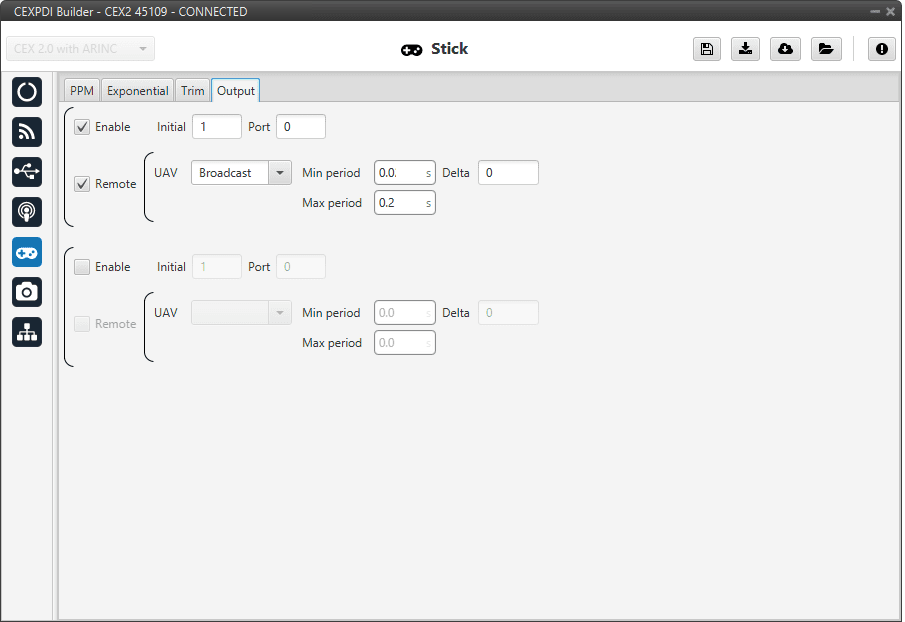
Stick - Output panel¶
In this menu, the following parameters can be configured:
Enable.
Initial Channel at destination: The user indicates to which channel of the air autopilot will be sent the first channel received in the ground unit. The channels arrive at the platform in order and without spaces between them.
For example, if at the GND channels 6, 7, 8, 9 and 10 are enabled, the AIR will receive channels 1, 2, 3, 4 and 5. Therefore channel 6 of the stick will be channel 1 in the AIR configuration.
Port: If more than one transmitter is configured, each transmitter must be configured on a different port. This has to match the port set on the air unit.
Remote: It has to be enabled if the user wants to allow the delivery of the commands to the platform.
UAV: The address of the UAV that receive the commands has to be indicated. The following options are the most common:
App 2: Veronte applications address.
Broadcast: The commands are sent to all units on the network. This option is recommended.
1x v4.X XXXX: The address of a specific air unit.
For more information on the available addresses, see List of addresses section of the CEX Software Manual.
Min period: As the period is the inverse of the frequency, this is the maximum frequency. Therefore, to give the pilot more control, this is the frequency that is set when the stick is commanding. A Min period of 0.02s is recommended.
Max period: As the period is the inverse of the frequency, this is the minimum frequency. Thus, to free up bandwidth, this is the frequency that is set when the stick is idle. A Max period of 0.2s is recommended.
Delta: This parameter determines whether the frequency is set to the minimum or maximum period set above.
If CEX detects a change above the delta value, the frequency goes to the maximum frequency (minimum period). While if the changes are less than this value, it switches to the minimum frequency (maximum period). 10 Hz are recommended.
An example of how to configure a stick can be found in the Stick - Integration examples section of the 1x PDI Builder user manual.